|
В.А. Авдеев, В.Ф. Гузик
Компьютеры: шины, контроллеры, периферийные устройства
Учебное пособие. Таганрог: ТРТУ, 2001. - 536 с.
1. Систематизация ПУ и интерфейсов
1.3. Функциональная классификация интерфейсов
Классификация
– это начало науки, занимающейся нахождением общих признаков в разнородных
объектах. Примером удачной параметрической классификации является периодическая
система элементов Д.И. Менделеева. В настоящее время для систематизации
объектов совершенствуется морфологический метод. При использовании
морфологического метода в технике основное внимание уделяется классификации
элементов (узлов, блоков) и их связей в устройствах, в частности классификации
существенных признаков изобретательских технических решений. Однако при таком
подходе из-за наличия большого числа разнотипных элементов (особенно это
характерно для устройств вычислительной техники) не удается найти единого
подходящего принципа классификации для устройств одного назначения.
Разработка всякого устройства начинается с создания способа
его функционирования (принципа работы мысленной модели устройства). Таким
образом, способ (алгоритм) функционирования является первичным, а устройство,
построенное в соответствии с этим способом, вторичным. Одному и тому же способу
может быть поставлено в соответствие множество (подкласс) устройств с различными
техническими характеристиками (быстродействием, сложностью оборудования, надежностью
и т.д.)
Поэтому для классификации устройств, в том числе интерфейсов,
следует использовать основные признаки способов их функционирования, чтобы
избежать ненужной мелкой детализации и выяснить наиболее важные элементы.
Обычно для устройств вычислительной техники способы
функционирования рассматриваются как процесс взаимосвязанных действий по
преобразованию, хранению, анализу и передаче информации с помощью материальных
объектов (дешифраторов, регистров, шин, сумматоров и т.п.). Однако такой подход
в описании способов функционирования устройств не позволяет установить общие
классификационные признаки.
Предлагается функциональная классификация, состоящая из
нескольких уровней, каждый из которых содержит ряд классификационных признаков.
К основным обязательным уровням относятся следующие:
-
дисциплины
обслуживания;
-
структуры данных;
-
способы передачи
битов, байтов, слов и т.д.;
-
методы
согласования во времени (синхронизации) и т.д.
Кроме того,
для устройств, например контроллеров, следует учитывать режимы (фазы) ввода,
обработки и вывода данных. Для блоков, входящих в состав устройства, возможна
своя функциональная классификация. Уровень дисциплины обслуживания (обработки)
является переменным относительно классов устройств и постоянным внутри каждого
класса (устройств одного назначения), например, устройства приоритета с
равноправной относительной и абсолютной приоритетной дисциплиной обслуживания.
Другой классификационный уровень связан со структурой данных.
В области вычислительной техники для некоторых классов устройств имеется
тенденция приводить в соответствие структуру данных со структурой надлежащих
устройств. Если при вводе (выводе) данных используется одна структура данных, а
при обработке – другая, то возникает необходимость в преобразовании структур
данных, что приводит к значительным затратам времени и (или) аппаратурных
средств, т.е. структура данных существенно влияет на техническое решение при
разработке устройства.
Следующий классификационный уровень связан со способом
передачи данных. В общем случае можно выделить параллельно-параллельный,
параллельно-последовательный, последовательно-параллельный и
последовательно-последовательный способы передачи слов (байтов) и битов, например,
параллельно по словам (байтам) и последовательно по битам.
Очередной классификационный уровень содержит функциональные
признаки временного согласования передаваемых при обрабатывании данных. На этом
уровне можно выделить: синхронное, асинхронное, апериодическое (с квитированием),
изохронное согласование (координацию) во времени.
Предлагаемую систему классификационных признаков, на наш
взгляд, необходимо ввести в структуру описания устройства (объекта изобретения)
в качестве ключевых слов для автоматизации поиска патентной информации.
Обязательное перечисление классификационных (функциональных) признаков в
разделе и указание области техники, к которой относится изобретение, могло бы
дать большой информационный смысл. Это позволило бы четко определить назначение
и область применения устройства, понять принцип его функционирования и
правильно выбрать аналоги. Но, самое главное, предлагаемая система
классификации является методикой изобретательского творчества, т.к.
способствует разработке новых устройств и автоматизации поиска аналогов, т.е.
содействует созданию банка знаний по патентным источникам информации
(информационного обеспечения изобретательского творчества). Итак, поставленная
задача имеет множество возможных решений, и трудность состоит в том, чтобы
отбросить заведомо неверные; имеющаяся у пользователя информация может быть
неполной или нечетко заданной; в процессе решения задачи необходимо будет
консультировать пользователя и давать советы, анализировать и классифицировать
данные, проводить поиск, обмениваться информацией, представлять ее в требуемой
форме, прогнозировать, обосновывать действия. Поэтому для решения поставленной
задачи необходимо использовать экспертную систему. Тогда задача поискового
проектирования устройств вычислительной техники разобьется на две подзадачи:
1)
выбор варианта
(прототипа) технического решения и разработка способа его функционирования
(экспертная система 1);
2)
банк
эвристических приемов (экспертная система 2).
Экспертная система 1 должна содержать систему МКИ
(индексы патентной классификации), позволяющую классифицировать устройства,
набор функциональных параметров (признаков), позволяющих представить каждое
устройство в виде морфологического кода (набора классификационных признаков) и
совокупности технических характеристик. Экспертная система 1 позволит пользователю
выбрать (разработать) способ функционирования устройства по функциональным
признакам и найти наиболее близкое техническое решение (прототип), содержащееся
в банке данных экспертной системы; просмотреть варианты всех близких проектных
решений; выбрать желаемый положительный эффект (цель проектирования) для
доказательства эквивалентности устройств, т.е. экспертная система будет
использоваться как автоматизированный интеллектуальный подсказчик способов
функционирования устройств (генератор технических решений).
Инструментальное средство для создания экспертной системы
поискового проектирования должно отвечать следующим требованиям:
-
обладать высокой
степенью гибкости;
-
иметь ориентацию
на обработку знаний;
-
взаимодействовать
с пользователем на естественном языке;
-
объяснять
рассуждения в ходе решения задачи;
-
оперировать
неполными и неопределенными данными;
-
обеспечивать
легкий доступ к средствам помощи и подсказок;
-
предлагать
пользователю содержательные инструкции для ответа на подсказки;
-
использовать
правила для описания логических связей между значениями параметров и выводом
заключений. Возможность выражения знаний в форме продукционных правил позволит
легко пополнять базу знаний экспертной системы, что дает возможность включения
в систему экспертных знаний по другим классам устройств;
-
поддерживать
прямую и обратную модели вывода;
-
иметь средство
взаимодействия и доступа к базам данных, что позволит создать архив авторских
свидетельств и находить среди них прототип.
Такими возможностями программных средств обладает оболочка
экспертной системы Персональный консультант плюс (PC PLUS), которая позволяет строить базы знаний для различных
предметных областей на персональных компьютерах, совместимых с PC/AT IBM, совместно с базой данных, созданной с помощью dBase.
Рассмотрим принцип функциональной классификации интерфейсов
различных типов (системных, локальных, периферийных последовательных и параллельных,
приборных, дисковых, малых компьютерных систем и т.д.).
На рис.1.2 представлен морфологический граф функциональной
классификации интерфейсов.
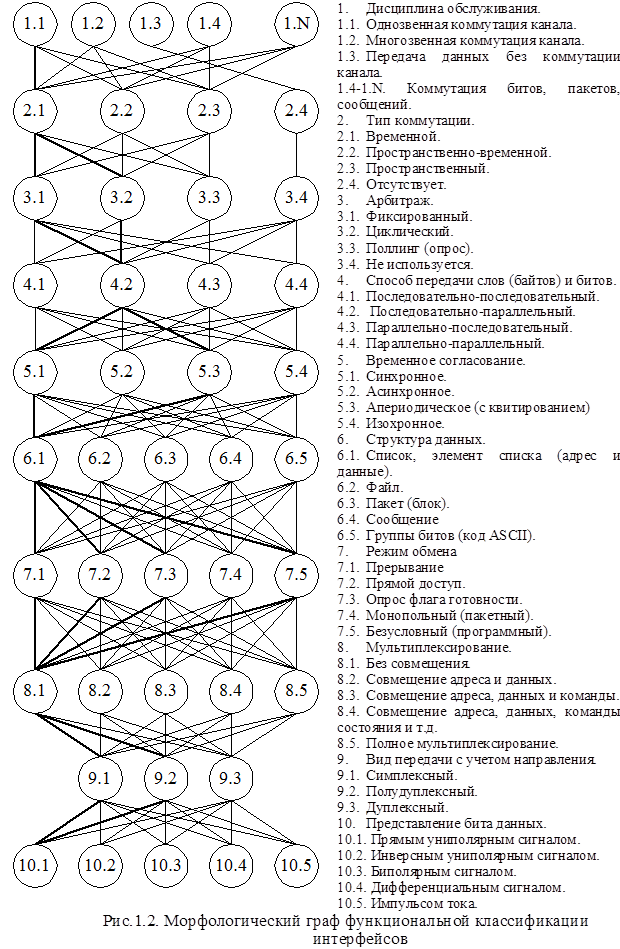
Морфологический граф, содержащий 10 уровней и только 3 вершины
в каждом уровне, уже определяет 54756 вариантов построения интерфейсов.
Системной шине ISA PC/AT соответствует выделенный маршрут в графе (морфологический
код): 1.1,
2.1, (3.1, 3.2), 4.2, (5.1, 5.3), 6.1, (7.1, 7.2, 7.3, 7.5), 8.1, (9.1, 9.2),
10.1. Следует отметить, что дополнительная детализация (увеличение числа вершин)
на каждом уровне и (или) создание дополнительного морфологического графа для
какого-либо уровня приводит к значительному увеличению числа решений при
реализации интерфейсов, в том числе и неизвестных. Например, при анализе
первого уровня графа можно указать, что коммутация в общем случае каналов может
быть централизованная или децентрализованная, произвольная (случайная) или
разовая (список соединений известен заранее), однозвенная или многозвенная,
полнодоступная (неполнодоступная) и т.д. Каждый признак (вершина), указанный в
графе, приводит к определенному техническому решению соответствующего интерфейса,
т.е. функциональный признак в этом смысле должен быть существенным. Поэтому
разделение интерфейсов по назначению (локальные, системные, периферийные,
приборные и т.д.) не выделяется в морфологическом графе в виде отдельного
уровня. Эти интерфейсы определяются соответствующими маршрутами в
морфологическом графе. Например, периферийный (последовательный) интерфейс RS-232 описывается маршрутом в графе:
1.3 (дисциплина обслуживания – передача данных типа точка-точка); 4.1 (способ
передачи – последовательная передача группы битов (8-5) и последовательная
передача битов каждой группы); 5.1-5.3 (временное согласование – синхронное,
апериодическое или асинхронное координирование во времени); 6.5 (структура
данных – последовательная кодовая посылка стартстопного формата группы битов:
код ASCII … телеграфный код); 8.1 (отсутствие
мультиплексирования); 9.1 (вид передачи с учетом направления – симплексный);
10.3 (представление бита данных биполярным сигналом). В табл. 1.1 приведено
описание функциональных признаков некоторых типов интерфейсов.
Из табл. 1.1 видно, что системные интерфейсы ISA и Multibus имеют незначительные функциональные
отличия, состоящие в том, что интерфейс ISA является синхронным, а в ряде случаев –
апериодическим и с прямым униполярным представлением единичных битов адреса и
данных, а интерфейс Multibus –
апериодический интерфейс (с квитированием) и с инверсным униполярным представлением
единичных битов адреса и данных. Кроме того, имеется несходство в реализации
процедуры арбитража: в системной шине для выполнения этой цели используется
системный контроллер прямого доступа, а в интерфейсе Multibus – специальное устройство, состоящее
из арбитра шины и блока параллельного приоритета (последовательного
приоритета). Условию арбитража соответствует свой морфологический граф, который
здесь не показан.
Таблица 1.1
|
Название
интерфейса
|
Классификационные
уровни
|
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
|
Стандартная промышленная архитектура ISA
|
1.1
|
2.1
|
3.1,3.2
|
4.2
|
5.1, 5.3
|
6.1
|
7.1-7.3,7.5
|
8.1
|
9.1,9.2
|
10.1
|
|
Многошинный интерфейс Multibus
|
1.1
|
2.1
|
3.1,3.2
|
4.2
|
5.3
|
6.1
|
7.1-7.3,7.5
|
8.1
|
9.1, 9.2
|
10.2
|
|
Рекомендованный стандарт RS-232
|
1.3
|
2.4
|
3.4
|
4.1
|
5.1,5.2,5.3
|
6.5
|
7.5
|
8.1
|
9.1
|
10.3
|
|
Параллельный интерфейс
Centronics
|
1.3
|
2.4
|
3.4
|
4.2
|
5.3
|
6.5
|
7.5
|
8.1
|
9.1
|
10.3
|
|
Универсальная последовательная шина UBS
|
1.2
|
2.1
|
3.1
|
4.1
|
5.3, 5.4
|
6.3
|
7.1, 7.4
|
8.5
|
9.1, 9.2
|
10.4
|
|
Интерфейс малых компьютерных систем SCSI
|
1.2
|
2.1
|
3.1
|
4.2
|
5.1, 5.3
|
6.3
|
7.4, 7.5
|
8.5
|
9.1, 9.2
|
10.1 10.4
|
|
Периферийный связующий компонент PCI
|
1.1
|
2.1
|
3.1
|
4.2
|
5.3
|
6.1, 6.3
|
7.1,7.3,7.4
|
8.2
|
9.1, 9.2
|
10.1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Основным
различием системных интерфейсов от периферийных или приборных интерфейсов
является выполнение в них функции коммутации шины (канала) данных (признаки 1.1
и 2.1). Рассмотрим уровни 1 и 2 более подробно, так как они имеют
принципиальное значение и существенно влияют на структуру настоящих и будущих
интерфейсов.
На рис1.3 изображена типичная структура 3-шинного системного
интерфейса, в которой шина данных (ШДАН) и приемопередатчик (ПП) исполнителей
(ИС) представляют собой децентрализованный (распределенный по ИС)
двунаправленный многобитный мультиплексор/демультиплексор, т.е. простейший
временной коммутатор, выполняющий коммутацию канала данных.
Структура содержит
несколько задатчиков (З1 – Зk) и исполнителей (ИС1 – ИСn). С помощью арбитра (АР) каждый
задатчик получает доступ к интерфейсу, состоящему из шин (Ш) адреса (АДР), данных
(ДАН) и управления (УПР). В ка-
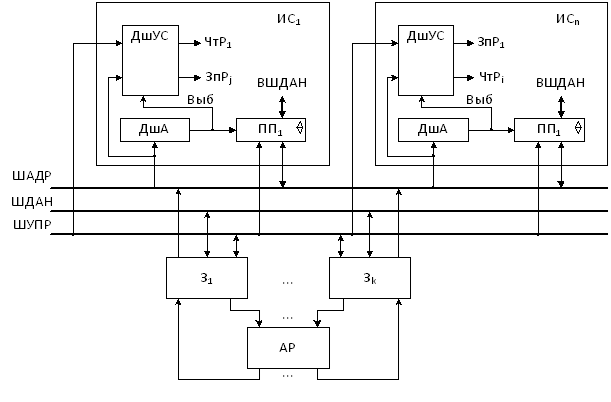
Рис.
1.3. Типичная структура системного интерфейса
кой-либо
момент времени пересылка данных выполняется между одним задатчиком и одним
исполнителем. В этой структуре основное внимание было уделено уменьшению числа
линий связи путем децентрализованного размещения частей временного коммутатора
на платах исполнителей. Каждая часть временного коммутатора содержит ПП,
дешифратор (селектор) адреса (ДшА) и дешифратор управляющих сигналов (ДшУС),
формирующий сигналы чтения (Чт) и записи (Зп) соответствующих регистров (Р) ИС.
Задатчик, получив доступ к шинам, в режиме записи устанавливает адрес
какого-либо регистра ИС на ШАДР и данные на ШДАН. Один из исполнителей опознает
собственный адрес и формирует на выходе ДшА сигнал выбор (Выб), который
разрешает работы ПП и ДшУС. Выбранный ПП пропускает данные ко входам внутренних
регистров ИС, причем нахождение одного из них по младшим битам адреса с
заданием соответствующей операции Чт или Зп осуществляет ДшУС, когда задатчик
устанавливает сигнал Зп по линии ШУПР. Таким образом, в режиме записи ПП1
– ППn представляют собой многошинный
децентрализованный демультиплексор.
В режиме
чтения активный задатчик направляет адрес и через некоторое время, необходимое
для декодирования адреса, устанавливает сигнал чтения (Чт) на соответствующей
линии ШУПР. Содержимое выбранного регистра ИС передается через ПП, открытого в
обратном направлении сигналами Выб и Чт, на ШДАН. После этого задатчик вводит
значения битов ШДАН во внутренний регистр. В режиме чтения ПП1 – ППn составляют многошинный децентрализованный
мультиплексор.
Другим
крайним решением является структура пространственного интерфейса ввода/вывода,
представленная на рис. 1.4 и содержащая системные шины (СШ1 – СШk), число которых в общем случае равно
числу задатчиков (З1 – Зk), и децентрализованный пространственный коммутатор,
распределенный по З1 – Зk и ИС1 – ИСn.
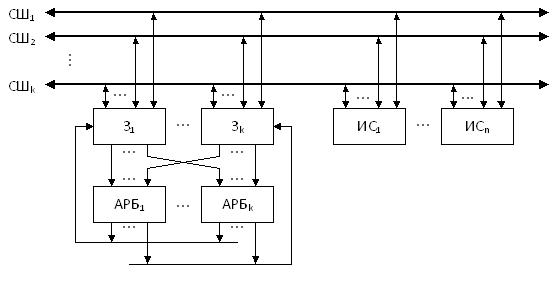
Рис.1.4.
Структура пространственного интерфейса ввода/вывода
с несколькими системными шинами
Каждой СШi соответствует АРБi, на который поступают запросы от З1
– Зk, и АРБi разрешает доступ к СШi наиболее приоритетному задатчику, т.е. каждый задатчик
может получить доступ к любой системной шине. Каждый задатчик, который также
может быть исполнителем, и исполнитель содержат многошинный мультиплексор/демультиплексор
(часть децентрализованного матричного коммутатора), позволяющий подключить
любую системную шину к внутренней шине компонента системы. На рис. 1.5 показана
структурная схема многошинного мультиплексора/демультиплексора, являющегося частью
распределенного матричного коммутатора.
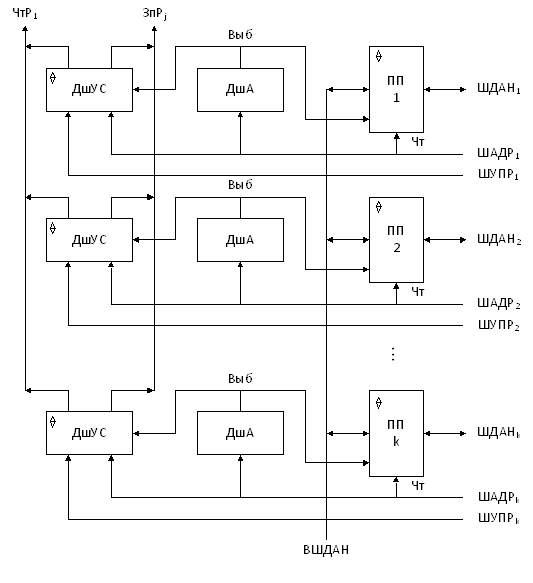
Рис.
1.5. Структурная схема многошинного мультиплексора/демультиплексора
Как видно из см. рис. 1.3 и рис. 1.5 многошинный
мультиплексор/демультиплексор в первом случае является централизованным
временным коммутатором, а во втором случае – децентрализованным. С целью
уменьшения числа линий связи схемные части арбитров могут быть также распределены
по устройствам.
Возможно
построение пространственно-временного интерфейса с децентрализованным матричным
пространственно-временным коммутатором, в котором число системных шин меньше,
чем число подключенных к этому интерфейсу задатчиков. Построение и анализ таких
интерфейсов ввода/вывода в данной книге не рассматривается и является отдельной
темой.
Коммутация
каналов, сообщений и пакетов достаточно хорошо описана в литературе, посвященной
технике связи.
Коммутация
каналов заключается в выделении физического канала для связи компонентов
системы. Коммутация сообщений, содержащих заголовок, адрес приемника, данные и
т.д., выполняется по маршруту, состоящему из узлов связи.
При
коммутации пакетов фиксированной длины, составляющих сообщение, осуществляется
также их передача по маршруту узлов связи, т.е. в этом случае сообщение
разбивается на пакеты.
Кроме того,
отметим, что возможна, например, пространственная коммутация битов данных без
построения физического канала связи.
Некоторых пояснений требует списковая структура данных,
используемая в морфологическом графе для классификации интерфейсов. Обычно в
методах программирования употребляются данные, связанные между собой
указателями (адресами), составляющие список. Если система содержит несколько
задатчиков (процессоров), решающих общую задачу, то данные задатчиков имеют
указатели (адреса процессоров) направления передачи данных, т.е. адрес и
соответствующее ему данное (данные) являются элементами списка. В общем случае
будем также считать адрес и соотносящиеся с ним данные элементами списковой
структуры.
Классификационные
признаки уровня временного согласования, связанного с передачей данных, имеют
следующее объяснение.
При
синхронной передаче данных каждый бит данных сопровождается синхросигналом или
ее начало и завершение происходит в фиксированные моменты времени, определяемые
устройством управления. Поэтому системная шина ISA является в основном синхронной шиной.
Термин «асинхронный интерфейс» (асинхронная передача) имеет
несколько интерпретаций. Иногда называют интерфейс с обязательным квитирующим
(обратным) сигналом в циклах ввода и вывода асинхронным интерфейсом, что является,
на наш взгляд, не совсем правильным определением.
Асинхронная
передача данных – это передача с произвольными интервалами времени и нестрогими
требованиями во времени ожидания данных.
Следует
отметить, что обязательный сигнал квитирования в интерфейсе Multibus, сообщающий об успешном завершении
операции, кроме того, используется для согласования "медленных" ПУ с
работой процессора, т.е. в случае его отсутствия в работе процессора
вставляется заданное количество тактов ожидания. Эта возможность сигнала
квитирования продлить на некоторое заданное время передачу данных (время
ожидания) и позволяет называть ее асинхронной. В этом случае нарушается
основное требование для асинхронной передачи – это передача с произвольными
интервалами и в любой момент времени. Такая асинхронная передача выполняется в
интерфейсе RS–232, который может не использовать
сигнал квитирования. В интерфейсе RS–232 асинхронную передачу данных можно осуществлять в любой момент
времени и со всякой продолжительностью. Кроме того, существуют асинхронные схемы
без сигналов квитирования. Схемы, в которых окончание переходного процесса
завершается формированием сигнала квитирования, называют апериодическими.
Разработана апериодическая система логических элементов. Поэтому интерфейсы с обязательным
сигналом квитирования будем называть апериодическими (с квитированием).
Системный интерфейс Multibus и периферийный параллельный интерфейс Centronics
являются апериодическими.
Сигнал квитирования в системных интерфейсах выполняет
следующие функции:
- сообщает об успешном завершении операции ввода или вывода;
- указывает процессору о наличии данных на шине при вводе в
него;
- синхронизирует работу "медленных" электронных
устройств с процессором (удлиняет цикл на шине).
В интерфейсе Centronics сигнал квитирования ( ) имеет другое назначение – это готовность
печатающего устройства, в том числе и механических, принять данные из
процессора. ) имеет другое назначение – это готовность
печатающего устройства, в том числе и механических, принять данные из
процессора.
Системная шина ISA
содержит линию I/O CH RDY (готовности канала ввода/вывода) с необязательным
соответствующим сигналом, позволяющую осуществить апериодическую передачу данных,
т.е. согласовать работу "медленного" ПУ с работой процессора путем
вставки определенного числа тактов ожидания. Таким образом, если в шине ISA используется сигнал I/O CH RDY, то шина ISA в этом случае является апериодической. Поэтому системную шину ISA следует назвать синхронной, а в ряде
случаях апериодической.
Синхронная передача данных является более быстродействующей,
чем асинхронная или апериодическая передача. Зато апериодическая координация действий
на шине позволяет обнаружить ошибку на интерфейсе в случае отсутствия сигнала
квитирования. Асинхронная передача не требует синхронизации каждого бита данных
и разрешает передавать данные в произвольные моменты времени.
Изохронная передача данных – это периодическая (в равные
промежутки времени) и непрерывная передача изохронных данных, потока данных,
синхронизация которых зависит от интенсивности поступлений. Изохронная передача
реализуется в универсальной шине USB,
использующей дифференциальные сигналы.
Шина USB может быть отнесена к универсальным
периферийным интерфейсам, так как позволяет подключать ПУ различных типов
(мышь, клавиатуру, адаптер телефона, звуковую колонку, принтер и т.д.).
Основное ее отличие от периферийных интерфейсов RS – 232 и Centronics (см. табл. 1.1) характеризуется функциональными признаками 1.2 и 2.1
(многозвенная коммутация канала с временным типом коммутации). Шина USB имеет древовидную структуру с узлами
(хабами), к которым подключаются ПУ и (или) ветви (сегменты кабеля шины) для
подключения к другим хабам. Таким образом, шина USB – это древовидная сеть ПУ (рис. 1.6 а) с многозвенной
временной коммутацией б)).
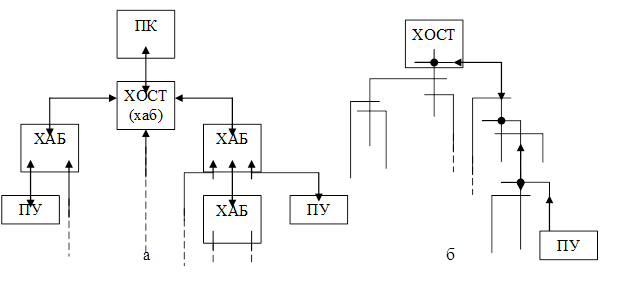
Рис. 1.6. Древовидная структура шины USB
Связь
между ПК (хостом) и ПУ образует многозвенный коммутационный канал. Протокол
шины USB напоминает протокол локальной сети:
посылается пакет с данными, в котором указывается адрес ПУ. После завершения
передачи данных ПУ отвечает пакетом подтверждения, в котором отмечается
результат этой передачи. Шина USB
содержит 2 скрученные дифференциальные линии D+ и D-, по
которым передаются дифференциальные сигналы данных (рис.1.7).
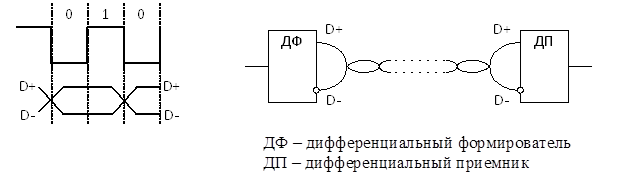
Рис. 1.7. Дифференциальные сигналы
шины USB
Классификационные функциональные признаки шины USB, дающие представление о принципе ее
работы, следующие:
многозвенная
коммутация канала (1.2); временной тип коммутации (2.1); последовательно –
последовательный способ передачи данных (4.1); апериодическое и изохронное
временное согласование (5.3, 5.4); пакетная структура данных (6.3); режимы
обмена: прерывание (7.1), монопольный, пакетный (7.4); полное мультиплексирование
(8.5); симплексный и полудуплексный виды передач (9.1, 9.2); представление
битов данных на шине дифференциальными сигналами (10.4).
Последовательный
периферийный интерфейс RS-232
был разработан для сопряжения с модемом и содержит последовательные линии
передаваемых TxD и принимаемых данных RxD. На рис.1.8 показана общая схема
соединения ПК и модема, которая может работать в асинхронном или синхронном
режиме.
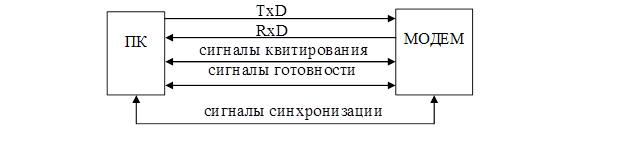
Рис. 1.8. Общая схема соединения ПК и
модема
Интерфейс RS–232
способен выполнять с учетом временного согласования следующие типы передач:
асинхронную, асинхронную с квитированием, синхронную с бит-ориентированными или
байт-ориентированными протоколами.
Обычно с помощью интерфейса RS–232 к ПК подключаются последовательные устройства: мышь,
трекбол, принтер и т.д. Простейший тип асинхронной передачи без квитирования
для связи двух ПК показан на рис. 1.9.

Рис. 1.9. Простая схема связи двух ПК
Для выполнения асинхронной передачи используется специальный
программируемый формат последовательной кодовой посылки, содержащий стартовый и
стоповые биты, необходимые для ее синхронизации.
При синхронной передаче каждый бит данных, передаваемый по
линии TxD (RxD), сопровождается по соответствующей линии
синхронизации синхросигналом.
С целью увеличения помехозащищенности и снижения потребляемой
мощности в нагрузке данные по односторонним линиям TxD (RxD)
передаются и принимаются биполярными сигналами (рис. 1.10) с помощью
специальных драйверов (формирователей) и приемников.
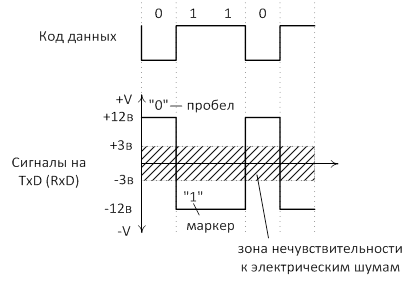
Рис. 1.10. Представление кода данных
на линиях TxD (RxD)
На
рис. 1.11 показана схема связи драйвера (ДР) и приемника (ПР) интерфейса RS–232.
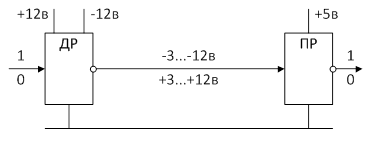
Рис. 1.11. Схема связи драйвера и
приемника интерфейса RS–232
Функциональные
характеристики интерфейса RS–232
приведены в см. табл. 1.1.
Если требованиям системы не удовлетворяет интерфейс RS–232, может быть использован один из
следующих последовательных интерфейсов: RS–422, RS–423
или токовая петля, разрешающие увеличить длину связи и (или) скорость передачи
данных.
Дифференциальный интерфейс RS–422 является также односторонним (с симплексным видом
передачи по линии связи), позволяющим подключить к драйверу до 10 приемников.
На рис. 1.12 изображена схема соединения дифференциальных драйвера (ДД) и
приемника (ПР) симметричного интерфейса RS–422.
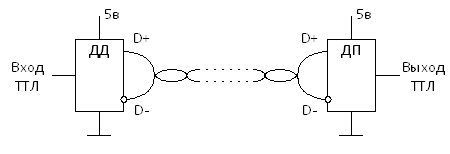
Рис. 1.12. Схема соединения ДД и ДП
линии RS–422
Дифференциальный принцип передачи увеличивает ее
помехоустойчивость и длину связи.
На рис. 1.13 приведена схема линии связи RS–422, содержащая дифференциальный
приемник 75115 с настраиваем временем отклика, и драйвер, реализованный на базе
двух инверторов с открытым коллектором.
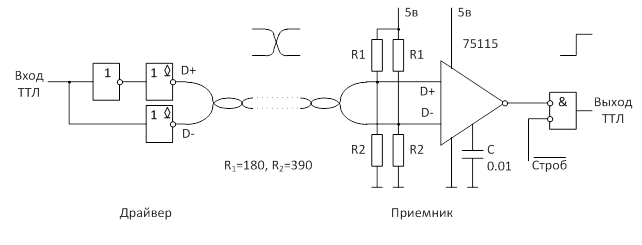
Рис. 1.13. Схема линии связи RS–422
Существуют дифференциальные приемники с петлей гистерезиса и
настраиваемой постоянной времени, эффективно устраняющие помехи на линии связи.
Дальнейшим развитием этого интерфейса является интерфейс RS–485, допускающий подключение к одной
линии нескольких источников и приемников (дуплексный вид передачи).
Несимметричный дифференциальный интерфейс RS–423 отличается от симметричного – RS–422 наличием общего обратного
земляного провода для нескольких сигнальных линий. На рис. 1.14 показана линия
передачи RS–423.
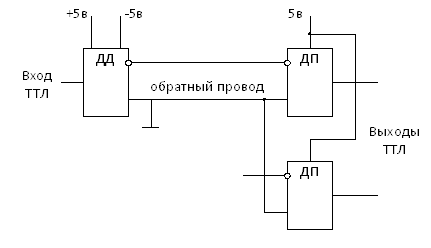
Рис. 1.14. Линия передачи RS – 423
Интерфейс (ИРПС, интерфейс радиальный последовательный) с
токовой петлей является менее стандартизированным интерфейсом, чем, например, RS–232. Этот интерфейс представляет собой
источник и приемник тока, составляющие электрическую цепь. В такой цепи импульс
тока, превышающий 17(20) мА соответствует логической единице, а импульс тока
меньше 2 мА – логическому нулю. Интерфейс «токовая петля» используется в
технических системах для передачи информации на значительные расстояния. В
интерфейсе используются оптроны, представляющие собой комбинацию
светоизлучателя и фотоприемника, например, светодиода и фототранзистора. В
зависимости от расположения источника тока в драйвере или приемнике существуют различные
схемы интерфейса токовой петли. Один из вариантов схемы интерфейса с токовой
петлей показан на рис. 1.15.
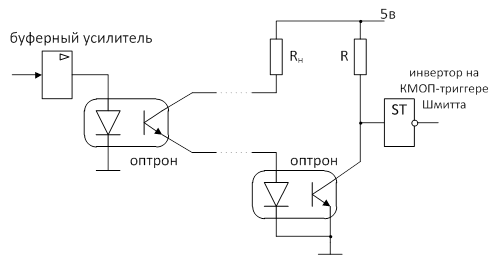
Рис. 1.15. Схема интерфейса токовой
петли с источником тока в приемнике
Кроме того, при построении интерфейса с токовой петлей
драйверы и приемники могут быть активными или пассивными, возможно размещение
оптрона только в приемнике или в драйвере и приемнике, применяется развязанный
источник питания только для линии связи и т.д. В табл. 1.2 представлены
некоторые технические характеристики последовательных интерфейсов.
Таблица 1.2
|
Тип интерфейса
|
Скорость (Кбит/с)
|
Длина (м)
|
Количество приемников
|
|
RS
– 232 (стык С2)
|
20
|
16
|
1
|
|
RS
– 422
|
10000
1000
100
|
13
130
1300
|
до 10
|
|
RS
– 423
|
100
10
1
|
10
100
1300
|
до 10
|
|
Токовая петля 20 мА (ИРПС)
|
10
1
|
300
2000
|
1 (может быть несколько)
|
Параллельный периферийный интерфейс Centronics предназначен для сопряжения ПК с
принтером. На рис. 1.16 показана схема общего вида интерфейса Centronics.
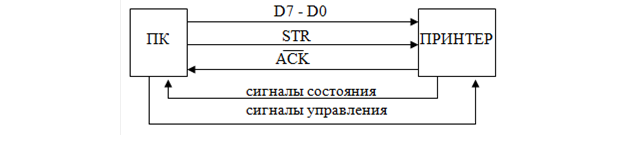
Рис. 1.16. Схема общего вида
интерфейса Centronics
Процессор ПК устанавливает на шину D7–D0 данные,
поступающие в принтер (его входной регистр данных). Затем процессор вторым
своим выводом формирует сигнал строб (STR), записывающий данные (символ) во входной регистр данных принтера. При
этом внутри принтера устанавливается сигнал прерывания, сообщающий его
микропроцессору (МП), что входной регистр данных полон. МП считывает этот
символ, анализирует его (это управляющий или выводимый на печать?), помещает печатаемый
символ в буфер и формирует сигнал (подтверждение
приема). Через прерывание или опрос сигнала процессор
может определить, что принтер готов принять очередной байт данных.
Функциональные признаки интерфейса Centronics приведены в см. табл.1.1. Основное
отличие этого интерфейса состоит в том, что используется последовательно –
параллельный способ передачи байтов и их битов.
Кратко рассмотрим функциональные признаки локальной шины PCI, показанные в см. табл. 1.1. На рис.
1.17 представлена общая схема локальной шины PCI.
Локальная шина PCI с
частотной синхронизацией 33 Мгц предназначена для подключения дисков,
графических дисплеев и содержит 32- или 64-битную мультиплексную шину
адрес/данные (AD). Сигналы квитирования «готовность цели»
(TRDY#) и «готовность инициатора» (TRDY#) имеют активный низкий уровень, на
который указывает знак #. Если в режиме обмена хотя бы один из этих сигналов
обладает высоким пассивным уровнем, то передача данных приостанавливается и в
работе шины выполняются циклы ожидания. Таким образом, шина PCI использует апериодическое (с
квитированием) временное согласование хоста и ПУ.
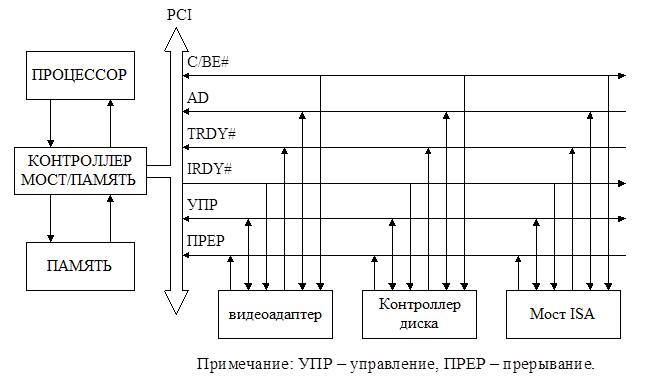
Рис. 1.17. Общая схема шины PCI
Цикл шины PCI содержит адресную фазу и одну или
несколько фаз данных. В адресной фазе передается, например, 32-битный адрес по
линиям AD и 4-битный код команды (записать в
порт (память), читать порт (память) и т.д.) по линиям C/BE#, а в фазе
данных направляются 32-битные данные по линиям AD и сигналы разрешения байтов по линиям C/BE#. В шине PCI
предусмотрены процедуры арбитража и прерывания.
Функциональные возможности шины PCI приведены в см. табл. 1.1, отметим некоторые из них:
однозвенная коммутация канала (1.1), временной тип коммутации (2.1), фиксированный
арбитраж (3.1), последовательно- параллельный способ передачи удвоенных
(учетверенных) слов и их битов (4.2), апериодическое временное согласование
(5.3) и т.д.
Интерфейс малых вычислительных систем (SCSI) относится к интерфейсам ввода/
вывода (универсальным параллельным периферийным интерфейсам) и предназначен для
сопряжения с ПК разнообразных ПУ (контроллеров НГМД, НЖМД, принтеров, адаптеров
сети и т.д.).
Интерфейс SCSI
позволяет подключить до восьми контроллеров ПУ, причем каждый из них может
содержать 8 логических блоков, а любой логический блок -
256
логических подблоков.
На рис.1.18 представлен общий вид интерфейса SCSI.
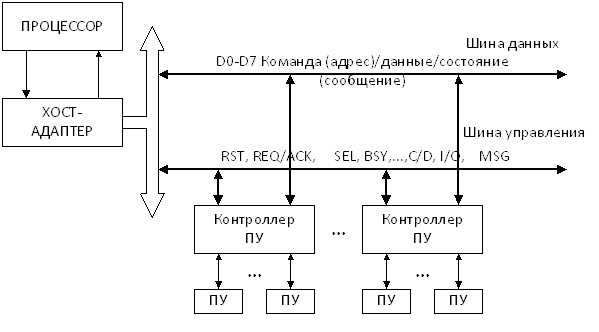
Рис. 1.18. Общий вид интерфейса SCSI
Интерфейс SCSI
содержит две шины: 8- битовую дифференциальную шину данных и шину управления,
основная часть сигналов которой показана на см. рис. 1.18. Шина данных
используется в мультиплексном режиме для передачи команды (адреса), данных,
состояния или сообщения, определение которых на шине выполняют коды сигналов
управления C/D, I/O и MSG (табл. 1.3).
Таблица 1.3
|
C/D
|
I/O
|
MSG
|
Операция
|
|
0
|
0
|
0
|
Вывод данных
|
|
0
|
0
|
1
|
Вывод данных
|
|
0
|
1
|
0
|
Вывод команды
|
|
0
|
1
|
1
|
Ввод состояния
|
|
1
|
0
|
0
|
Резерв
|
|
1
|
0
|
1
|
|
1
|
1
|
0
|
Вывод сообщения
|
|
1
|
1
|
1
|
Ввод сообщения
|
В работе шины SCSI
можно выделить следующие основные фазы: шина свободна, арбитраж, выборка
исполнителя, состояние и сообщение. После сигнала сброс (RST) шина находится в фазе «шина
свободна», определяемой пассивным уровнем сигнала BSY (шина занята). Из фазы «шина свободна» делается
переход в фазу арбитража, когда инициатор (задатчик) осуществляет выбор исполнителя,
устанавливая сигнал BSY и выводя на
шину данных идентификационный бит, номер линии которого определяет приоритет в
процедуре арбитража, причем максимальный номер имеет наивысший приоритет. После
того, как инициатор получает в свое распоряжение шину, он начинает фазу выборки
исполнителя, состоящую в том, что инициатор устанавливает сигнал SEL и идентификационный бит на линии
данных, номер которого равен идентификационному номеру устройства, установленному
с помощью перемычек в каждом ПУ. Затем выполняются фазы передачи информации:
команды, данных, состояния и сообщения, каждая из которых определяется кодом
управления на линиях C/D, I/O и MSG (см. табл. 1.3). Передача данных
осуществляется синхронным или апериодическим (с квитированием) временным
согласованием. Для выполнения апериодического способа используются сигналы
квитирования ACK и REQ.
В режиме записи инициатор выдает данные на шину данных и
затем устанавливает сигнал ACK,
причем данные сохраняются на шине до тех пор, пока исполнитель не сбросит
сигнал REQ, а в режиме чтения исполнитель
передает данные вместе с сигналом REQ и удерживает эти данные до тех пор пока от инициатора не придет сигнал ACK.
В связи с тем, что к шине SCSI возможно подключение разнообразных ПУ, имеется
большая система команд. В качестве примера приведем некоторые из них,
предназначенные для магнитных дисков: чтение состояния (03h), запись данных (0Ah), чтение данных (08h), поиск (0Bh) и т.д.
Данные на шине SCSI
передаются блоками. Поэтому в командах записи и чтения данных указывается
логический номер блока и количество передаваемых данных. Для задания номера блока
в этих командах используется 21-битный адрес и 8 битов для подсчета количества
передаваемых блоков. В команде поиска указывается 21-битный адрес.
Однокристальный хост–адаптер имеет программное обеспечение,
управляющее работой ПУ, подключенных к шине SCSI, и средства сопряжения с системным интерфейсом,
предусматривающие программный обмен и (или) обмен в режиме прямого доступа к
памяти.
Функциональные возможности шины SCSI приведены в см. табл.1.1. Здесь следует отметить, что
в интерфейсе SCSI так же, как и системных интерфейсах,
применяется децентрализованный временной коммутатор (8-битный децентрализованный
мультиплексор – демультиплексор), так как двусторонняя 8-битная шина данных
подключается к нескольким контроллерам ПУ. Однако отдельная шина адреса,
выбирающая контроллер ПУ и регистры в нем, в интерфейсе SCSI отсутствует. Для выполнения этой
функции в интерфейсе SCSI
используется шина данных, т.е. выполняется радиальный способ выбора ПУ.
Похожие материалы:
Функции, задачи и требования к рекламе
Функции финансов (Фролова Т.А.)
Функции теории государства и права и её место в системе юридических наук
Функциональные связи маркетинга на предприятии. Типовое положение и организационные структуры службы маркетинга
Фурнитурщик (Выпуск №46 ЕТКС )
Футеровщик (кислотоупорщик)
|
